中青报·中青网记者 邱晨辉
“中国嫦娥”再次上演“翩然落广寒”的精彩一幕:北京时间2024年6月2日6时23分,嫦娥六号着陆器和上升器组合体在鹊桥二号中继星支持下,成功着陆在月球背面南极-艾特肯盆地预选着陆区。
这是我国实施的第五次地外天体软着陆、第四次月球表面软着陆,以及第二次月球背面软着陆,标志着嫦娥六号成功跨过充满挑战的“落月”难关,为达成人类首次月球背面采样返回目标又向前迈出了关键一步。
5月3日,嫦娥六号探测器成功发射入轨,此后经历了地月转移、近月制动、环月飞行、着陆下降等过程。嫦娥六号探测器由轨道器、返回器、着陆器、上升器组成。5月30日,着陆器和上升器组合体与轨道器和返回器组合体实现在轨分离,如今成功着陆月球背面。
正所谓“千锤百炼出真功”,多项“硬核技术”在此次落月任务中尽显中国力量。
“选址讲究” 平稳着陆
嫦娥六号任务副总设计师王琼介绍,嫦娥六号任务实施人类首次月背采样返回,工程创新多、风险高、难度大,相比2020年实现月球正面采样返回的嫦娥五号任务,嫦娥六号任务突破了月球逆行轨道设计与控制技术,并将在鹊桥二号中继星的支持下,完成月背智能快速采样、月背起飞上升等关键技术节点。
“其着陆区选择直接关系到工程实施的风险控制、采样样品的科学成果产出等。”王琼说,相比月球正面,月球背面地形更为崎岖,尤其是南极-艾特肯盆地区域整体地势较低且撞击坑分布更多,光照和测控更易受到地形遮挡影响。这些因素都给嫦娥六号落月选址工作带来了挑战。
嫦娥六号探测器由航天科技集团五院抓总研制,据该院专家介绍,为了让嫦娥六号能够稳稳着陆月背,五院研制团队深入研讨和分析了月背采样任务的选址难点和特点,充分借鉴融合深空探测以往型号的选址经验,建立了一套适用于月背着陆的选址方法。
6月2日6时9分,嫦娥六号着陆器和上升器组合体开始实施动力下降,7500牛变推力主发动机开机。其间,组合体进行快速姿态调整,逐渐接近月表。
五院专家表示,研制团队利用以往型号遥感数据,对着陆区复杂地形地貌情况进行深入分析与确认,为着陆器和上升器组合体在月球表面寻找满足安全着陆、月面工作、月面起飞等需求的区域,并在确认着陆区后,对着陆区的地形地貌、地质条件等进行了多轮复核与研究工作,进一步降低着陆风险,保证选址区域分析完备、选址约束考虑全面、选址结果可信可用。
2日当天,组合体通过视觉自主避障系统进行障碍自动检测,利用可见光相机根据月面明暗选择大致安全点,在安全点上方100米处悬停,利用激光三维扫描进行精确拍照以检测月面障碍,最终选定着陆点,开始缓速垂直下降,即将到达月面时发动机关闭,利用缓冲系统保障组合体以自由落体方式到达月面,最终平稳着陆于月球背面南极-艾特肯盆地。
“两次避障” 精准落月
目前,“嫦娥”家族使用的GNC系统均由五院502所研制。GNC,为制导(Guidance)、导航(Navigation)与控制(Control)的简称。该系统需要实时知道“我在哪儿”“我要去哪儿”和“我怎么去”,它就像嫦娥六号着陆器和上升器组合体落月过程中的“驾驶员”,在极具挑战的落月过程中完成“飞行轨迹控制”“安全着陆点选择”“精准控制”三项核心任务。
五院502所专家介绍,嫦娥六号GNC系统需要在下降过程中自主选择一个既符合着陆要求,又能满足上升器月面起飞条件的落点,为后续的采样和起飞创造良好条件。之后,组合体开始径直飘移至选定落点的正上方并开始垂直下降,至月面特定高度时关闭主发动机,最终利用着陆腿的缓冲机构实现软着陆。
王琼表示,嫦娥六号探测器“出发”前,地面科研人员只能通过卫星遥感影像了解着陆区概况。真正着陆时究竟会遇到多少石块、撞击坑,都无法提前获知。
落月过程中,嫦娥六号着陆器和上升器组合体在GNC系统智能自主地操控下,边降落边快速调整姿态,对预定着陆区域进行拍照分析,选择着陆区域。然后,GNC系统控制组合体飞向选定区域。这是第一次避障,即“粗避障”。
在距离月面更近的预定高度时,着陆器和上升器组合体开始实施关键的短暂悬停,并再次对月面进行拍照,精确避开障碍,选定最终落点。这是第二次避障,即“精避障”。
这先后两次的障碍识别与落点选择,即所谓“粗精接力避障”技术,其中算法是精髓。
专家称,为适应月背降落,嫦娥六号GNC系统针对新的轨道以及鹊桥二号中继星通信部分进行了适应性调整。因嫦娥六号相比嫦娥五号要消耗更多的推进剂,研制人员对系统进行了针对性调整、优化和升级,在确保落月精度的同时又兼顾了资源使用的经济性。
“月背对话” 大幅提速
嫦娥六号的落点在月球背面,落月过程地球不可见。虽然嫦娥六号具有“自主落月”的能力,但实时掌握各项数据、随时发出控制指令,才能让“地球家人”及时掌握任务的实施过程。
落月时,地球上的控制中心和嫦娥六号探测器之间会产生大量的信息,这些信息的传输是由五院航天东方红卫星有限公司抓总研制的鹊桥二号中继星支持完成的。
与鹊桥中继星距月面最远9万公里的距离相比,鹊桥二号中继星远月点距离月面的最远距离约为1.6万公里。这使得鹊桥二号中继星在天线口径不变的情况下,大幅提高了通信速率。
五院专家介绍,相较于鹊桥中继星,研制团队还将鹊桥二号中继星的两个链路——从中继星到月面探测器、从月面探测器到中继星的最高码速率提高了近10倍,对地数据传输链路的最高码速率提高了近百倍,让通信能力“如虎添翼”。
值得一提的是,鹊桥二号中继星把同时接收探测器数据的数据传输通道,从鹊桥中继星的两路提高到了最多10路,在大幅提升通信速率的基础上又大幅增加了传输通道。这一设计使大量的数据通信成为可能,让“不可见”的月背降落“一切尽在掌握”。
“纤纤美腿” 轻盈落月
着陆月球背面可以说是“环环相扣、险象环生”,如果没有距离和速度信息的支持,嫦娥六号着陆器将处于“盲人瞎马”的窘境。
由五院西安分院研制的微波测距测速敏感器在着陆过程中起到了至关重要的作用。它就像是在着陆器上安装了一部“泊车雷达”,帮助着陆器和上升器组合体实现月背软着陆。
五院专家介绍,这部“雷达”在着陆器接近月球表面时开始工作,细致测量各项数据并进行精确信息传递,以便着陆器判断着陆点和降落速度,确保嫦娥六号控制身姿顺利“泊车”,为安全精准着陆提供可靠保障。
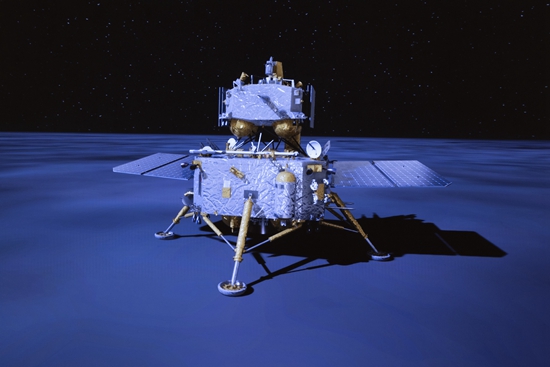
嫦娥六号着陆器和上升器组合体在月背软着陆之前,还要经受住“最后一落”的冲击。由五院529厂打造的4条轻质、高强的“纤纤美腿”让嫦娥六号落月更轻盈。
可别小看这“修长美腿”,它的学名是“着陆缓冲机构”,每条着陆腿都由一个主腿、两个副腿和一个足垫组成,各有分工、各司其职。在着陆前,采用特殊材料填充的主副腿协同工作,在着陆时安全地支撑住探测器的身体,将各种冲击力传递、吸收。
专家介绍,除拥有“修长美腿”,嫦娥六号着陆器还搭配了4个被称为“足垫”的圆形“大脚掌”。它看上去像4个大脸盆,直径差不多是普通人脚掌的两倍,其盆状结构以及设计巧妙的“足弓”,可以起到更好的缓冲作用,防止探测器在着陆月背时“摔倒”,提升嫦娥六号落月时的舒适“脚感”。
在着陆器的动力下降阶段,由五院510所为嫦娥六号探测器装备的着陆缓冲机构信号装置也开启了工作模式。专家表示,当着陆器到达月球表面预定高度时,该设备就会被触发并产生信号,着陆器明确自身的展开状态,准备在月面着陆。落月信号装置在着陆“足垫”接触月面时,受月面反作用力后触发开关,关闭反推发动机,从而保证探测器安全平稳落下。
来自国家航天局的消息称,嫦娥六号着陆器和上升器组合体成功着陆后,着陆器将通过鹊桥二号中继星,在地面控制下,进行太阳翼和定向天线展开等状态检查与设置工作,此后正式开始持续约两天的月背采样工作,通过钻具钻取和机械臂表取两种方式分别采集月壤样品和月表岩石,实现多点、多样化自动采样。同时将开展月球背面着陆区的现场调查分析、月壤结构分析等科学探测,深化月球成因和演化历史的研究。